Momentum and Adaptive Learning Rates: Accelerating Deep Learning Optimization
Introduction
While vanilla gradient descent laid the foundation for modern machine learning, training deep neural networks requires more sophisticated optimization techniques. In this comprehensive guide, we’ll explore momentum-based methods and adaptive learning rate algorithms that have become the backbone of deep learning optimization.
Key Insight
The journey from SGD to Adam represents one of the most impactful advances in deep learning, reducing training time from weeks to hours for many architectures.
The Problem with Vanilla Gradient Descent
Standard gradient descent suffers from several critical limitations:
- Slow convergence in ravines (regions where the surface curves more steeply in one dimension)
- Oscillation around local minima
- Uniform learning rates across all parameters
- Sensitivity to learning rate selection
Let’s visualize the optimization landscape:
graph TD
A[Start: Random Initialization] --> B{Gradient Descent Type}
B -->|Vanilla GD| C[Slow, Oscillating Path]
B -->|Momentum| D[Faster, Smoother Path]
B -->|Adam| E[Adaptive, Optimal Path]
C --> F[Local Minimum]
D --> F
E --> F
style C fill:#ff6b6b
style D fill:#ffd93d
style E fill:#6bcf7f
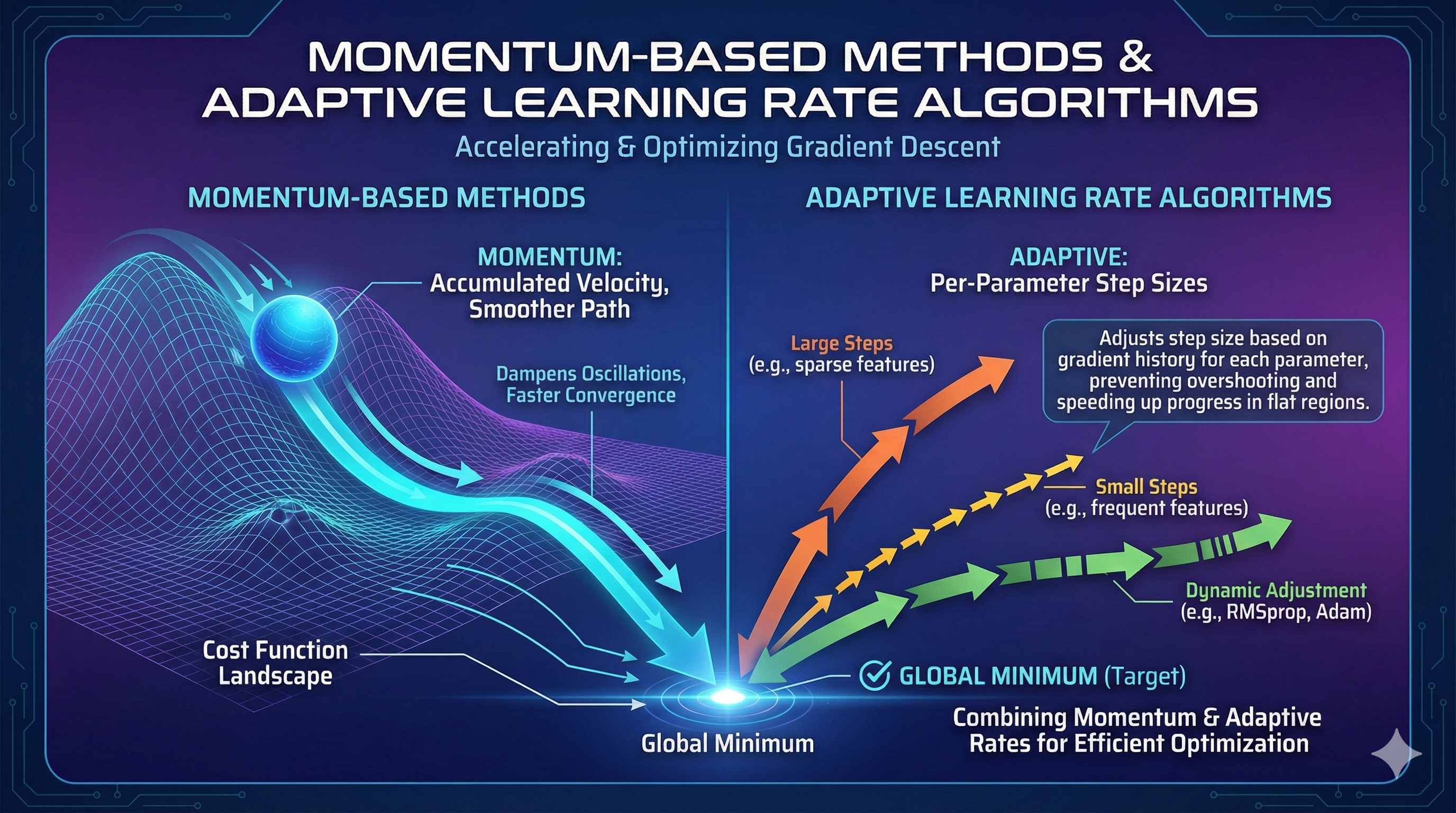
Momentum: Physics-Inspired Optimization
The Core Concept
Momentum borrows from physics: imagine a ball rolling down a hill. It accumulates velocity as it descends, allowing it to:
- Accelerate through flat regions
- Dampen oscillations in steep ravines
- Escape shallow local minima
Mathematical Formulation
The momentum update rule introduces a velocity term $v$:
\[\begin{aligned} v_t &= \beta v_{t-1} + \nabla J(\theta_{t-1}) \\ \theta_t &= \theta_{t-1} - \alpha v_t \end{aligned}\]Where:
- $v_t$ is the velocity at time $t$
- $\beta$ is the momentum coefficient (typically 0.9)
- $\alpha$ is the learning rate
- $\nabla J(\theta)$ is the gradient
Nesterov Accelerated Gradient (NAG)
Nesterov momentum improves upon standard momentum by looking ahead:
\[\begin{aligned} v_t &= \beta v_{t-1} + \nabla J(\theta_{t-1} - \beta v_{t-1}) \\ \theta_t &= \theta_{t-1} - \alpha v_t \end{aligned}\]This “look-ahead” gradient provides better convergence properties.
Python Implementation
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
import numpy as np
from typing import Tuple, List
class MomentumOptimizer:
"""
Gradient descent with momentum optimization.
Attributes:
learning_rate: Step size for parameter updates
momentum: Momentum coefficient (beta)
velocity: Accumulated gradient history
"""
def __init__(self, learning_rate: float = 0.01, momentum: float = 0.9):
self.learning_rate = learning_rate
self.momentum = momentum
self.velocity = None
def update(self, params: np.ndarray, gradients: np.ndarray) -> np.ndarray:
"""
Update parameters using momentum.
Args:
params: Current parameter values
gradients: Computed gradients
Returns:
Updated parameters
"""
# Initialize velocity on first call
if self.velocity is None:
self.velocity = np.zeros_like(params)
# Update velocity: v = beta * v + grad
self.velocity = self.momentum * self.velocity + gradients
# Update parameters: theta = theta - lr * v
params = params - self.learning_rate * self.velocity
return params
class NesterovOptimizer:
"""Nesterov Accelerated Gradient optimizer."""
def __init__(self, learning_rate: float = 0.01, momentum: float = 0.9):
self.learning_rate = learning_rate
self.momentum = momentum
self.velocity = None
def update(self, params: np.ndarray, gradient_fn) -> np.ndarray:
"""
Update parameters using Nesterov momentum.
Args:
params: Current parameter values
gradient_fn: Function that computes gradients at given params
Returns:
Updated parameters
"""
if self.velocity is None:
self.velocity = np.zeros_like(params)
# Look-ahead step
params_ahead = params - self.momentum * self.velocity
# Compute gradient at look-ahead position
gradients = gradient_fn(params_ahead)
# Update velocity and parameters
self.velocity = self.momentum * self.velocity + gradients
params = params - self.learning_rate * self.velocity
return params
# Example usage
def rosenbrock_gradient(params):
"""Gradient of the Rosenbrock function."""
x, y = params
dx = -400 * x * (y - x**2) - 2 * (1 - x)
dy = 200 * (y - x**2)
return np.array([dx, dy])
# Initialize optimizers
momentum_opt = MomentumOptimizer(learning_rate=0.001, momentum=0.9)
nesterov_opt = NesterovOptimizer(learning_rate=0.001, momentum=0.9)
# Starting point
params = np.array([-1.0, 1.0])
# Run optimization
for i in range(100):
gradients = rosenbrock_gradient(params)
params = momentum_opt.update(params, gradients)
if i % 20 == 0:
print(f"Iteration {i}: params = {params}")
Adaptive Learning Rate Methods
The Motivation
Different parameters often require different learning rates:
- Sparse features need larger updates (they update infrequently)
- Dense features need smaller updates (they update constantly)
- Deep layers may need different rates than shallow layers
AdaGrad: Adaptive Gradient Algorithm
AdaGrad adapts the learning rate for each parameter based on historical gradients:
\[\theta_{t,i} = \theta_{t-1,i} - \frac{\alpha}{\sqrt{G_{t,i} + \epsilon}} \cdot g_{t,i}\]Where $G_{t,i}$ is the sum of squared gradients for parameter $i$ up to time $t$:
\[G_{t,i} = \sum_{\tau=1}^{t} g_{\tau,i}^2\]Warning: AdaGrad Limitation
The accumulated squared gradients grow monotonically, causing the learning rate to eventually become infinitesimally small. This makes AdaGrad unsuitable for training deep networks.
RMSprop: Root Mean Square Propagation
RMSprop fixes AdaGrad’s diminishing learning rate problem using an exponentially weighted moving average:
\[\begin{aligned} E[g^2]_t &= \beta E[g^2]_{t-1} + (1-\beta) g_t^2 \\ \theta_t &= \theta_{t-1} - \frac{\alpha}{\sqrt{E[g^2]_t + \epsilon}} \cdot g_t \end{aligned}\]Adam: Adaptive Moment Estimation
Adam combines the best of momentum and RMSprop, maintaining both:
- First moment (mean) of gradients (like momentum)
- Second moment (uncentered variance) of gradients (like RMSprop)
The complete Adam update:
\[\begin{aligned} m_t &= \beta_1 m_{t-1} + (1-\beta_1) g_t \\ v_t &= \beta_2 v_{t-1} + (1-\beta_2) g_t^2 \\ \hat{m}_t &= \frac{m_t}{1-\beta_1^t} \\ \hat{v}_t &= \frac{v_t}{1-\beta_2^t} \\ \theta_t &= \theta_{t-1} - \frac{\alpha}{\sqrt{\hat{v}_t} + \epsilon} \cdot \hat{m}_t \end{aligned}\]Default hyperparameters: $\beta_1 = 0.9$, $\beta_2 = 0.999$, $\epsilon = 10^{-8}$
Complete Implementation
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
class AdamOptimizer:
"""
Adam (Adaptive Moment Estimation) optimizer.
Combines momentum and RMSprop for robust optimization.
"""
def __init__(
self,
learning_rate: float = 0.001,
beta1: float = 0.9,
beta2: float = 0.999,
epsilon: float = 1e-8
):
self.learning_rate = learning_rate
self.beta1 = beta1
self.beta2 = beta2
self.epsilon = epsilon
# Initialize moment estimates
self.m = None # First moment (mean)
self.v = None # Second moment (uncentered variance)
self.t = 0 # Time step
def update(self, params: np.ndarray, gradients: np.ndarray) -> np.ndarray:
"""
Update parameters using Adam algorithm.
Args:
params: Current parameter values
gradients: Computed gradients
Returns:
Updated parameters
"""
# Initialize moments on first call
if self.m is None:
self.m = np.zeros_like(params)
self.v = np.zeros_like(params)
self.t += 1
# Update biased first moment estimate
self.m = self.beta1 * self.m + (1 - self.beta1) * gradients
# Update biased second raw moment estimate
self.v = self.beta2 * self.v + (1 - self.beta2) * (gradients ** 2)
# Compute bias-corrected first moment estimate
m_hat = self.m / (1 - self.beta1 ** self.t)
# Compute bias-corrected second raw moment estimate
v_hat = self.v / (1 - self.beta2 ** self.t)
# Update parameters
params = params - self.learning_rate * m_hat / (np.sqrt(v_hat) + self.epsilon)
return params
class RMSpropOptimizer:
"""RMSprop optimizer with exponentially decaying average of squared gradients."""
def __init__(
self,
learning_rate: float = 0.001,
decay_rate: float = 0.9,
epsilon: float = 1e-8
):
self.learning_rate = learning_rate
self.decay_rate = decay_rate
self.epsilon = epsilon
self.cache = None
def update(self, params: np.ndarray, gradients: np.ndarray) -> np.ndarray:
"""Update parameters using RMSprop."""
if self.cache is None:
self.cache = np.zeros_like(params)
# Accumulate squared gradients
self.cache = self.decay_rate * self.cache + (1 - self.decay_rate) * (gradients ** 2)
# Update parameters
params = params - self.learning_rate * gradients / (np.sqrt(self.cache) + self.epsilon)
return params
Comparative Analysis
Convergence Speed Comparison
graph LR
A[Optimization Algorithms] --> B[SGD]
A --> C[Momentum]
A --> D[RMSprop]
A --> E[Adam]
B --> F[Baseline Speed]
C --> G[2-3x Faster]
D --> H[3-5x Faster]
E --> I[5-10x Faster]
style B fill:#ff6b6b
style C fill:#ffd93d
style D fill:#95e1d3
style E fill:#6bcf7f
When to Use Each Optimizer
| Optimizer | Best For | Pros | Cons |
|---|---|---|---|
| SGD | Convex problems, simple models | Simple, well-understood | Slow, requires tuning |
| Momentum | Deep networks, ravines | Faster than SGD, smooth | Still needs LR tuning |
| RMSprop | RNNs, non-stationary problems | Adaptive LR | Can be unstable |
| Adam | Most deep learning tasks | Fast, robust, minimal tuning | Can overfit, memory intensive |
Tip: Optimizer Selection
Start with Adam for rapid prototyping. If you have time for hyperparameter tuning, SGD with momentum often achieves better final performance on vision tasks.
Advanced Techniques
Learning Rate Scheduling
Even with adaptive optimizers, learning rate schedules improve performance:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
class CosineAnnealingScheduler:
"""Cosine annealing learning rate schedule."""
def __init__(self, initial_lr: float, T_max: int, eta_min: float = 0):
self.initial_lr = initial_lr
self.T_max = T_max
self.eta_min = eta_min
def get_lr(self, epoch: int) -> float:
"""Get learning rate for current epoch."""
return self.eta_min + (self.initial_lr - self.eta_min) * \
(1 + np.cos(np.pi * epoch / self.T_max)) / 2
class StepDecayScheduler:
"""Step decay learning rate schedule."""
def __init__(self, initial_lr: float, drop_rate: float = 0.5, epochs_drop: int = 10):
self.initial_lr = initial_lr
self.drop_rate = drop_rate
self.epochs_drop = epochs_drop
def get_lr(self, epoch: int) -> float:
"""Get learning rate for current epoch."""
return self.initial_lr * (self.drop_rate ** (epoch // self.epochs_drop))
Gradient Clipping
Prevent exploding gradients in RNNs and transformers:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
def clip_gradients(gradients: np.ndarray, max_norm: float = 5.0) -> np.ndarray:
"""
Clip gradients by global norm.
Args:
gradients: Gradient array
max_norm: Maximum allowed norm
Returns:
Clipped gradients
"""
total_norm = np.linalg.norm(gradients)
if total_norm > max_norm:
gradients = gradients * (max_norm / total_norm)
return gradients
Practical Training Loop
Here’s a complete training loop incorporating these concepts:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
def train_model(
model,
X_train: np.ndarray,
y_train: np.ndarray,
epochs: int = 100,
batch_size: int = 32,
optimizer_type: str = 'adam'
):
"""
Complete training loop with modern optimization.
Args:
model: Neural network model
X_train: Training features
y_train: Training labels
epochs: Number of training epochs
batch_size: Mini-batch size
optimizer_type: 'sgd', 'momentum', 'rmsprop', or 'adam'
"""
# Initialize optimizer
optimizers = {
'sgd': lambda: MomentumOptimizer(learning_rate=0.01, momentum=0.0),
'momentum': lambda: MomentumOptimizer(learning_rate=0.01, momentum=0.9),
'rmsprop': lambda: RMSpropOptimizer(learning_rate=0.001),
'adam': lambda: AdamOptimizer(learning_rate=0.001)
}
optimizer = optimizers[optimizer_type]()
# Learning rate scheduler
scheduler = CosineAnnealingScheduler(initial_lr=0.001, T_max=epochs)
n_samples = X_train.shape[0]
history = {'loss': [], 'lr': []}
for epoch in range(epochs):
# Update learning rate
current_lr = scheduler.get_lr(epoch)
optimizer.learning_rate = current_lr
# Shuffle data
indices = np.random.permutation(n_samples)
X_shuffled = X_train[indices]
y_shuffled = y_train[indices]
epoch_loss = 0
n_batches = n_samples // batch_size
for batch in range(n_batches):
# Get mini-batch
start_idx = batch * batch_size
end_idx = start_idx + batch_size
X_batch = X_shuffled[start_idx:end_idx]
y_batch = y_shuffled[start_idx:end_idx]
# Forward pass
predictions = model.forward(X_batch)
loss = model.compute_loss(predictions, y_batch)
# Backward pass
gradients = model.backward(X_batch, y_batch)
# Gradient clipping
gradients = clip_gradients(gradients, max_norm=5.0)
# Update parameters
model.params = optimizer.update(model.params, gradients)
epoch_loss += loss
# Log progress
avg_loss = epoch_loss / n_batches
history['loss'].append(avg_loss)
history['lr'].append(current_lr)
if epoch % 10 == 0:
print(f"Epoch {epoch}/{epochs} - Loss: {avg_loss:.4f} - LR: {current_lr:.6f}")
return history
Conclusion
The evolution from vanilla gradient descent to adaptive optimizers represents a crucial advancement in deep learning:
- Momentum accelerates convergence and dampens oscillations
- Adaptive learning rates handle sparse features and varying parameter scales
- Adam combines both approaches for robust, fast optimization
Key Takeaways
- Use Adam as your default optimizer for most tasks
- Consider SGD + Momentum for final fine-tuning on vision models
- Always use learning rate scheduling for best results
- Apply gradient clipping when training RNNs or transformers
Next Steps
In our next post, we’ll explore second-order optimization methods like L-BFGS and natural gradient descent, and when they outperform first-order methods.
References
- Kingma & Ba (2014). “Adam: A Method for Stochastic Optimization”
- Sutskever et al. (2013). “On the importance of initialization and momentum in deep learning”
- Tieleman & Hinton (2012). “RMSprop: Divide the gradient by a running average”
- Ruder (2016). “An overview of gradient descent optimization algorithms”
Related Posts: